
1. Pyöröneulekoneen teknologian esittely
1. Pyöröneulekoneen lyhyt esittely
Pyöröneulekone (kuten kuvassa 1 on esitetty) on laite, joka kutoo puuvillalangasta putkimaisen kankaan. Sitä käytetään pääasiassa erilaisten kohoneulosten, T-paitojen ja erilaisten reikäkuvioisten kankaiden neulomiseen. Rakenteen mukaan se voidaan jakaa yksinkertaiseen jersey-pyöröneulekoneeseen ja kaksinkertaiseen jersey-pyöröneulekoneeseen, joita käytetään laajalti tekstiiliteollisuudessa.
 2. Prosessivaatimukset
2. Prosessivaatimukset
(1) Invertterin on oltava kestävä ympäristön vaikutuksille, koska työympäristön lämpötila on suhteellisen korkea ja vanu voi helposti aiheuttaa jäähdytyspuhaltimen jumiutumisen ja vaurioitumisen sekä jäähdytysreikien tukkeutumisen.
(2) Joustava portaaton käyttö on välttämätöntä. Portaaton käyttöpainikkeita on asennettu useisiin paikkoihin laitteessa, ja invertterin on reagoitava nopeasti.
(3) Nopeudensäädössä tarvitaan kolme nopeutta. Yksi on ryömintänopeus, yleensä noin 6 Hz; toinen on normaali kudontanopeus, jonka korkein taajuus on jopa 70 Hz; ja kolmas on hidas keräilytoiminto, joka vaatii noin 20 Hz:n taajuuden.
(4) Pyöröneulekoneen käytön aikana moottorin pyörittäminen ja kääntäminen on ehdottomasti kielletty, muuten neulapedin neulat taivuttavat tai rikkoutuvat. Jos pyöröneulekoneessa on yksivaiheinen laakeri, tätä ei oteta huomioon. Jos järjestelmä pyörii eteen- ja taaksepäin, se on täysin riippuvainen moottorin pyörimisestä eteen- ja taaksepäin. Toisaalta sen on kyettävä estämään taaksepäin pyöriminen, ja toisaalta sen on asetettava tasavirtajarrutus pyörimisen poistamiseksi.
3. Suorituskykyvaatimukset
Kutomisen aikana kuorma on raskas ja ryömintä-/käynnistysprosessin on oltava nopea, mikä edellyttää invertteriltä matalaa taajuutta, suurta vääntömomenttia ja nopeaa vasteaikaa. Taajuusmuuttaja käyttää vektoriohjaustilaa moottorin nopeuden vakautustarkkuuden ja matalataajuisen vääntömomentin tuoton parantamiseksi.
4. Ohjausjohdotus
Pyöröneulekoneen ohjausosa on mikrokontrolleri tai PLC + ihmisen ja koneen rajapinta. Taajuusmuuttajan käynnistystä ja pysäytystä ohjataan liittimien kautta, ja taajuus annetaan analogisena suureena tai monivaiheisena taajuusasetuksena.
Moninopeusohjauksessa on periaatteessa kaksi ohjaustapaa. Toinen on analogisen signaalin käyttö taajuuden asettamiseen. Olipa kyseessä sitten ryömintä tai nopea ja hidas toiminta, analogisen signaalin ja käyttöohjeet antaa ohjausjärjestelmä; toinen on taajuusmuuttajan käyttö. Sisäänrakennetun monivaiheisen taajuusasetuksen ansiosta ohjausjärjestelmä antaa monivaiheisen taajuuden kytkentäsignaalin, ryömintäsignaalin tarjoaa itse invertteri ja suurnopeuskuormitustaajuus annetaan invertterin analogisena tai digitaalisena asetuksena.
2. Paikan päällä olevat vaatimukset ja käyttöönottosuunnitelma
(1) Paikan päällä suoritettavat vaatimukset
Pyöröneulekoneteollisuudessa invertterin ohjaustoiminnolle on suhteellisen yksinkertaiset vaatimukset. Yleensä se kytketään liittimiin käynnistyksen ja pysäytyksen ohjaamiseksi, annetaan analoginen taajuus tai käytetään moninopeuksista taajuuden asettamiseen. Hitaan toiminnan on oltava nopeaa, joten invertterin on ohjattava moottoria tuottaakseen suuren matalataajuisen vääntömomentin matalalla taajuudella. Yleensä pyöröneulekoneissa taajuusmuuttajan V/F-tila riittää.
(2) Virheenkorjauskaavio Käyttämämme kaavio on: C320-sarjan anturiton virtavektori-invertteri Teho: 3,7 ja 5,5 kW
3. Virheenkorjausparametrit ja -ohjeet
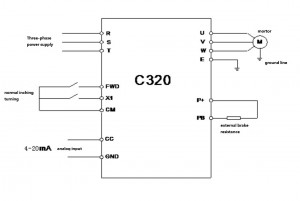
1. Kytkentäkaavio
2. Virheenkorjausparametrien asettaminen
(1) F0.0=0 VF-tila
(2) F0.1 = 6 taajuustulokanavan ulkoinen virtasignaali
(3) F0.4=0001 Ulkoisen liittimen ohjaus
(4) F0.6=0010 taaksepäin pyörimisen esto on voimassa
(5) F0.10 = 5 kiihtyvyysaika 5S
(6) F0.11 = 0.8 hidastuvuusaika 0.8S
(7) F0.16=6 kantoaaltotaajuus 6K
(8) F1.1=4 Vääntömomentin tehostus 4
(9) F3.0=6 Aseta X1 eteenpäin ryömintänopeudelle
(10) F4.10=6 aseta ryömintätaajuudeksi 6 Hz
(11) F4.21=3.5 Aseta ryömintäkiihdytysajaksi 3.5S
(12) F4.22=1.5 asettaa ryömintähidastusajaksi 1.5S
Virheenkorjaushuomautuksia
(1) Määritä ensin moottorin pyörimissuunta ryömintäajalla.
(2) Juoksun aikana esiintyvien tärinän ja hitaan vasteen ongelmien vuoksi juoksun kiihtyvyys- ja hidastuvuusaikaa on säädettävä vaatimusten mukaisesti.
(3) Matalataajuista vääntömomenttia voidaan parantaa säätämällä kantoaaltoa ja vääntömomentin tehostusta.
(4) Vanu tukkii ilmakanavan ja tuuletin pysähtyy, mikä heikentää invertterin lämmöntuottoa. Tämä tilanne on yleinen. Tällä hetkellä yleisinvertteri ohittaa lämpöhälytyksen ja poistaa nukan manuaalisesti ilmakanavasta ennen käytön jatkamista.
Julkaisun aika: 8.9.2023